|
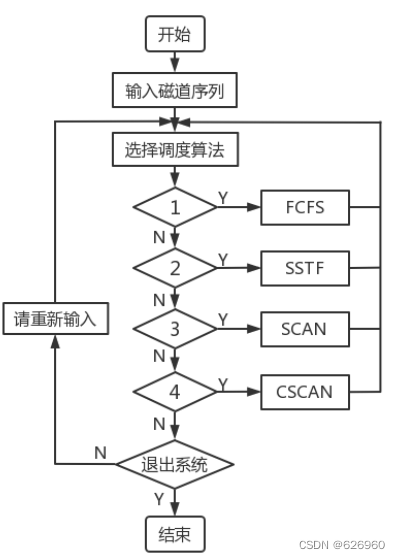
设计程序模拟先来先服务FCFS、最短寻道时间优先SSTF、扫描算法SCAN和循环扫描算法CSCAN的工作过程。假设有n个磁道号所组成的磁道访问序列,给定开始磁道号m和磁头移动的方向(正向或者反向),分别利用不同的磁盘调度算法访问磁道序列,给出每一次访问的磁头移动距离,计算每种算法的平均寻道长度。 二、实验原理1. 先来先服务算法(FCFS) 2. 最短寻道时间优先算法(SSTF) 3. 扫描算法(SCAN) 4. 循环扫描算法(CSCAN) 5. 四种算法优缺点对比 算法优点缺点先来先服务算法 公平、简单 平均寻道时间可能较长 最短寻道时间优先算法 可以得到比较好的吞吐量 不能保证平均寻道时间最短,可能出现“饥饿”现象 扫描算法 寻道性能较好,避免了饥饿现象的出现 两侧磁道被访问的频率仍低于中间磁道 循环扫描算法 消除了对两端磁道请求的不公平 只有到边上才能改变磁头移动方向 三、实验内容 为了减少对文件的访问时间,应采用一种最佳的磁盘调度算法。使各种进程对磁盘平均访问时间最小。由于在访问磁盘的事件中主要是寻道时间,因此,磁盘调度算法的目标是使磁盘的平均寻道时间最小。常用的磁盘调度算法有以下四种:先来先服务算法(FCFS),最短寻道时间优先算法(SSTF),扫描算法(SCAN),循环扫描算法(CSCAN)。下面会首先画出整体的程序流程图,然后再针对四种不同的调度算法的流程图进行详细设计和描述。 1. 主程序流程图
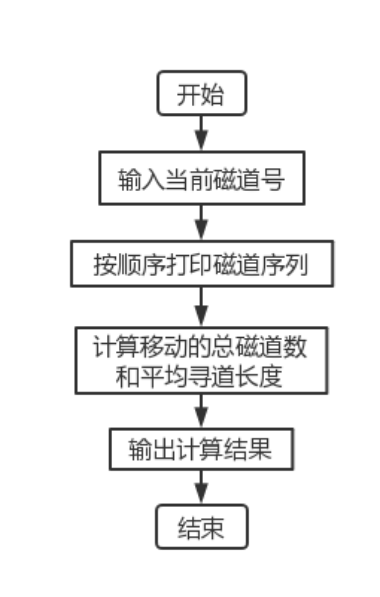
2. 先来先服务算法(FCFS) 先来先服务算法根据进程请求访问磁盘的先后次序进行调度。此算法的优点是公平、简单,且每个进程的请求都能依次得到处理,不会出现某一进程的请求长期得不到满足的情况。 其算法流程图如下图所示,首先输入当前磁道号并按顺序打印磁道序列,然后计算移动的总磁道数和平均寻道长度,并输出其计算结果。
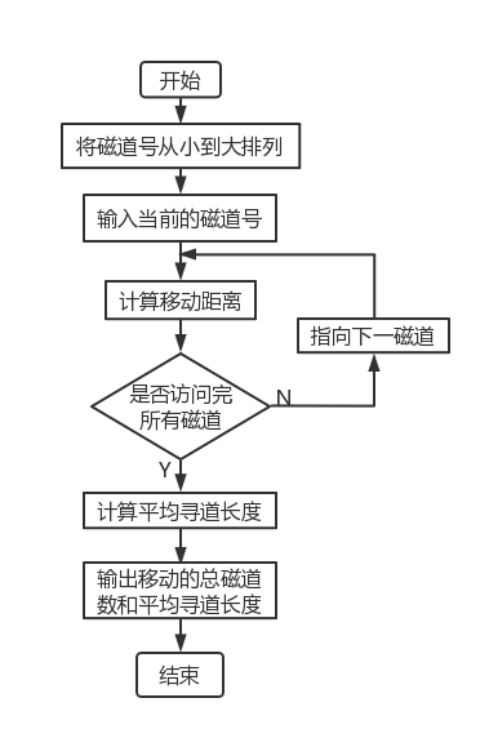
3. 最短寻道时间优先算法(SSTF) 该算法选择这样的进程,其要求访问的磁道与当前磁头所在的磁道距离最近,以使每次的寻道时间最短,但这种调度算法却不能保证平均寻道时间最短。 其算法流程图如下图所示,首先将磁道号从小到大排列并输入当前的磁道号,然后计算移动距离直至访问完所有的磁道。最后计算平均寻道长度并输出移动的总磁道数和平均寻道长度。
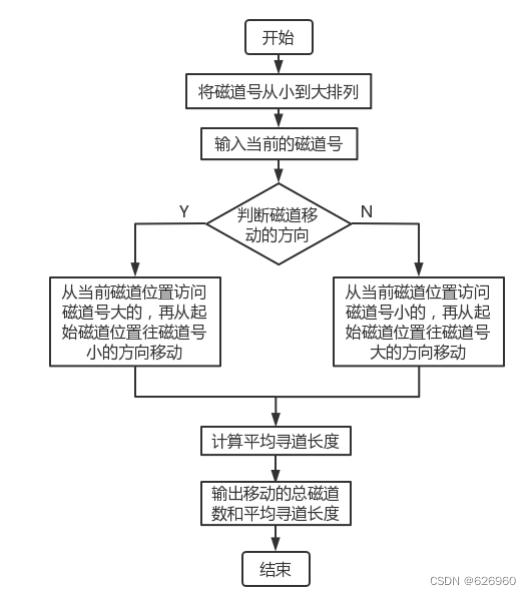
4. 扫描算法(SCAN) 扫描算法考虑的是磁头的当前移动方向,基本上克服了最短寻道时间优先算法的服务集中于中间磁道和响应时间变化比较大的缺点,不会产生饥饿现象。但是也有缺点,当磁头刚从里向外移动过某一磁道时,恰有一进程请求访问此磁道,这时该进程必须等待后才会处理其请求,致使该进程的请求被严重推迟。 其算法流程图如下图所示,首先将磁道号从小到大排列并输入当前的磁道号,然后判断磁道移动的方向,从当前磁道位置访问磁道号大(小)的,再从起始磁道位置往磁道号小(大)的方向移动。最后计算平均寻道长度并输出移动的总磁道数和平均寻道长度。
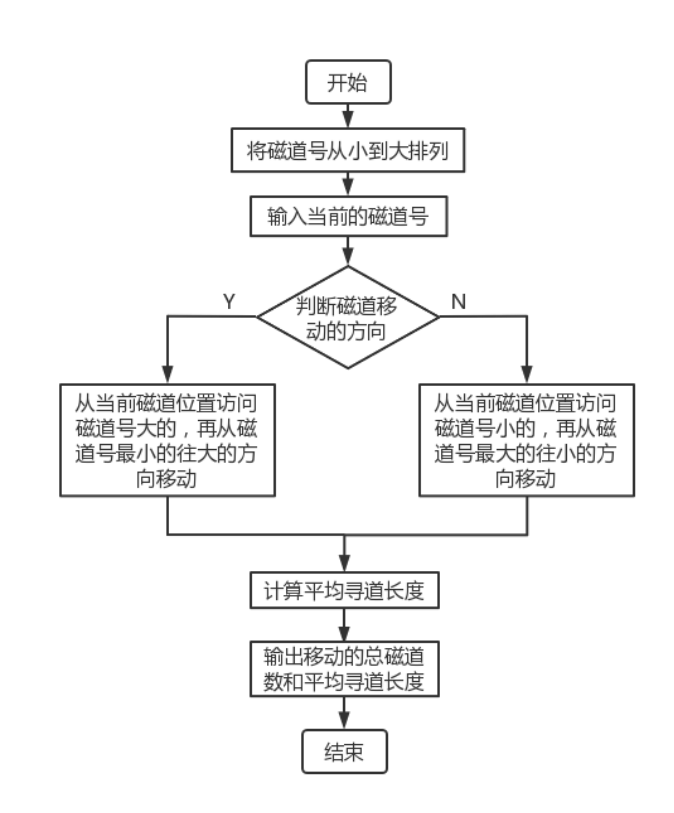
5.循环扫描算法(CSCAN) 为了减少SCAN算法造成的某些进程的请求被严重推迟,CSCAN算法规定磁头单向移动。例如,只自里向外移动,当磁头移到最外的被访问磁道时,磁头立即返回到最里的欲访磁道,即将最小磁道号紧接着最大磁道号构成循环,进行循环扫描。 其算法流程图如下图所示,首先将磁道号从小到大排列并输入当前的磁道号,然后判断磁道移动的方向,从当前磁道位置访问磁道号大(小)的,再从磁道号最小(大)方向的往大(小)的方向移动。最后计算平均寻道长度并输出移动的总磁道数和平均寻道长度。
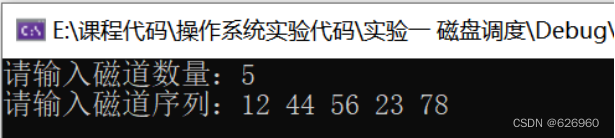
(1)首先输入磁道数量和序列。
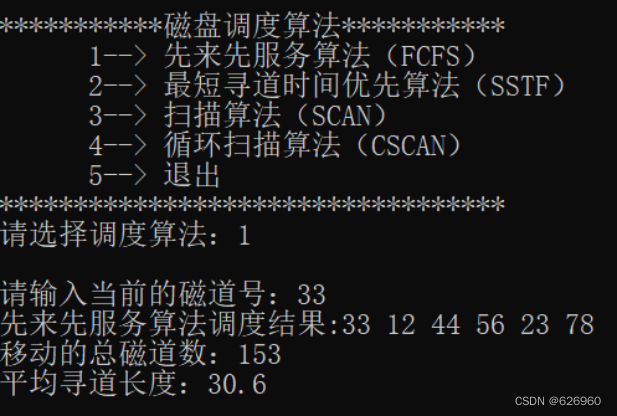
(2)然后根据提示选择四种不同的调度算法,选择1先来先服务算法,输入当前的磁道号可以看到先来先服务算法的调度结果、移动的总磁道数和平均寻道长度。
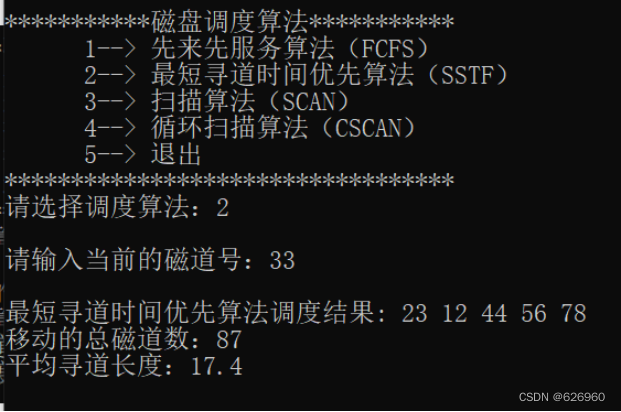
(3)选择2最短寻道时间优先算法,输入当前的磁道号可以看到最短寻道时间优先算法的调度结果、移动的总磁道数和平均寻道长度。
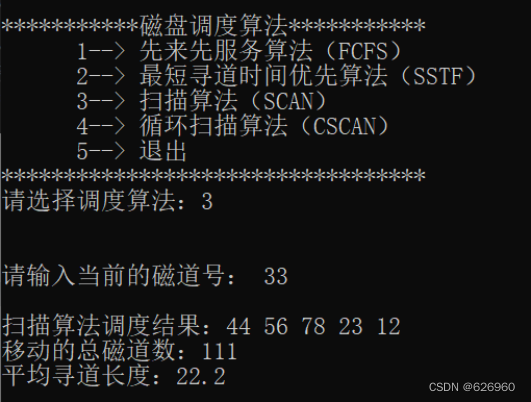
(4)选择3扫描算法,输入当前的磁道号可以看到扫描算法的调度结果、移动的总磁道数和平均寻道长度。
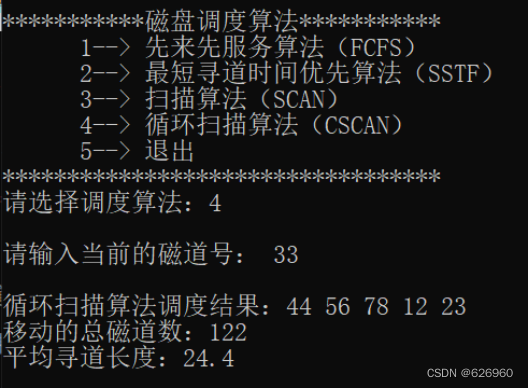
(5)选择4循环扫描算法,输入当前的磁道号可以看到循环扫描算法的调度结果、移动的总磁道数和平均寻道长度。
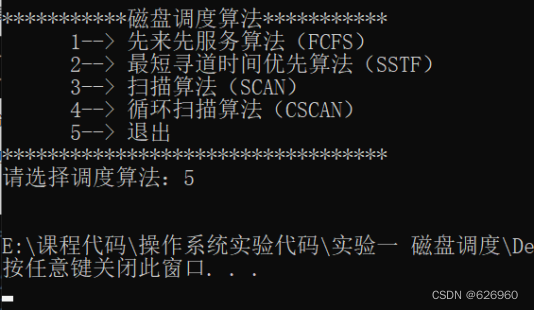
(6)测试完四种调度算法后,选择5退出系统。
本次实验通过模拟磁盘调度及进程排队算法来加深了对操作系统中各个磁盘调度算法概念的理解,实现各种不同调度算法的过程,并计算不同算法的平均寻道长度,以便于我们判断各种算法的优劣以及各种算法使用的场合。 |